2020-05-18 14:31:41 0
机器视觉(MV)是用于在工业上通常为自动检查,过程控制和机器人引导等应用提供基于图像的自动检查和分析 的技术和方法。机器视觉是指许多技术,软件和硬件产品,集成系统,操作,方法和专业知识。机器视觉作为系统工程学科可以被认为与计算机视觉(一种计算机科学形式)不同。它试图以新的方式集成现有技术,并将其应用于解决现实世界中的问题。该术语在工业自动化环境中是这些功能的常用术语,但在其他环境(例如安全性和车辆导航)中也用于这些功能。
整个机器视觉过程包括计划需求和项目的细节,然后创建解决方案。在运行时,该过程从成像开始,然后是图像的自动分析和所需信息的提取。
术语“机器视觉”的定义不尽相同,但都包括用于自动从图像中提取信息的技术和方法,这与图像处理相反,在图像处理中,输出是另一幅图像。提取的信息可以是简单的好/坏部分信号,或更复杂的数据集,例如图像中每个对象的身份,位置和方向。该信息可用于诸如工业中的自动检查,机器人和流程指导,安全监控和车辆指导等应用。该领域涵盖了大量技术,软件和硬件产品,集成系统,操作,方法和专业知识。 机器视觉实际上是工业自动化应用中用于这些功能的唯一术语。该术语在其他环境(例如安全性和车辆导航)中对于这些功能不太通用。可以将机器视觉作为系统工程学学科与计算机视觉(基本计算机科学的一种形式)区别开; 机器视觉试图以新的方式集成现有技术,并将其应用到满足工业自动化和类似应用领域要求的方式来解决实际问题。贸易展览会和贸易团体(例如自动成像协会和欧洲机器视觉协会)也广泛地使用该术语。这个更广泛的定义还包括最常与图像处理相关的产品和应用。机器视觉的主要用途是自动检查和工业机器人 /过程指导。参见机器视觉词汇表。
机器视觉的主要用途是基于图像的自动检查和分类以及机器人引导。在本节中前者缩写为“自动检查”。整个过程包括计划需求和项目的详细信息,然后创建解决方案。本节描述了解决方案运行期间发生的技术过程。
操作方法和顺序
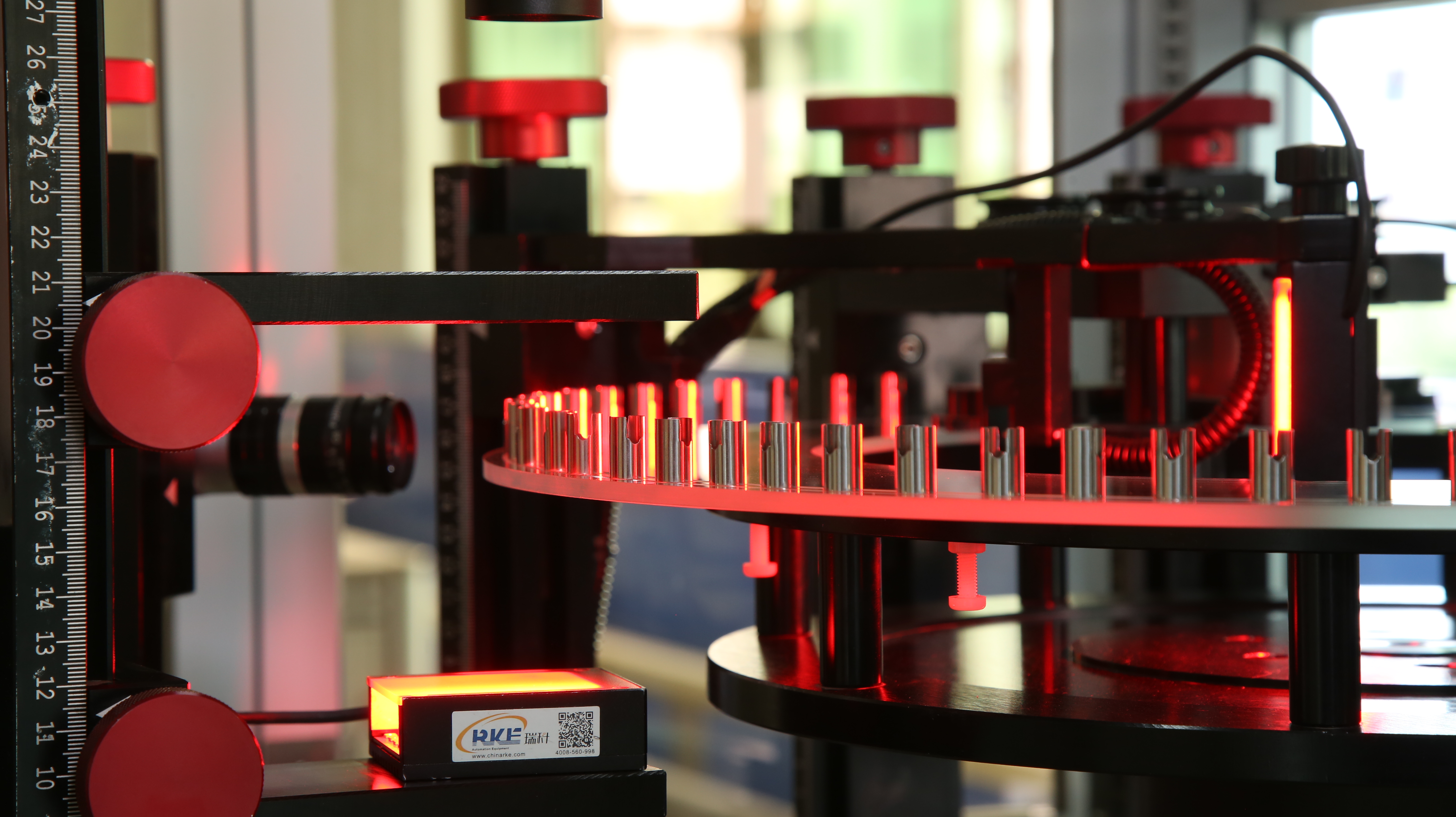
自动检查操作序列中的第一步是通常使用照相机,镜头和照明设备来获取图像,这些图像经设计可提供后续处理所需的差异。
设备
自动检查系统的组件通常包括照明,照相机或其他成像仪,处理器,软件和输出设备。

成像设备(例如相机)可以与主图像处理单元分离,也可以与其组合,在这种情况下,该组合通常称为智能相机或智能传感器。 将完整处理功能包含在与相机相同的外壳中通常被称为嵌入式处理。
分开时,可以使用模拟或标准化数字接口(Camera Link,CoaXPress)与计算机之间的专用中间硬件,定制处理设备或抓帧器建立连接。[17] [18] [19] [20]MV实施还使用能够通过FireWire,USB或千兆以太网接口直接连接(无帧捕获器)到计算机的数码相机。
尽管常规(2D可见光)成像是MV中最常用的方法,但替代方法包括多光谱成像,高光谱成像,对各种红外波段成像,线扫描成像,表面3D成像和X射线成像。 MV 2D可见光成像的关键区别在于单色vs.颜色,帧频,分辨率,以及成像过程在整个图像上是否是同时进行的,使其适合于移动过程。
尽管使用二维成像解决了绝大多数机器视觉应用,但利用3D成像的机器视觉应用却在行业中不断发展。成像最常用的方法是基于扫描的三角测量,该方法在成像过程中利用产品或图像的运动。激光投射到物体表面。在机器视觉中,这是通过移动工件或移动相机和激光成像系统的扫描运动来完成的。摄像机从不同角度观看了该线。线的偏差代表形状变化。来自多次扫描的线被组装成深度图或点云。[26] 立体视觉用于特殊情况下,涉及一对摄像机的两个视图中都具有的独特功能。[26]用于机器视觉的其他3D方法是飞行时间和基于网格的。[26] [24]一种方法是使用伪随机结构光系统的基于网格阵列的系统,该系统由大约2012年的Microsoft Kinect系统采用。[27] [28]
图像处理
获取图像后,将对其进行处理。中央处理功能通常由CPU,GPU,FPGA或它们的组合完成。深度学习训练和推理对处理性能提出了更高的要求。 通常按照最终所需结果的顺序使用多个处理阶段。典型的序列可能始于诸如过滤器之类的工具,这些工具会修改图像,然后提取对象,然后从这些对象中提取(例如,测量,读取代码)数据,然后传达该数据或将其与目标值进行比较,创建并传达“通过/失败”结果。机器视觉图像处理方法包括:
拼接 / 套准:合并相邻的2D或3D图像。[ 需要引用 ]
过滤(例如形态过滤)
阈值:阈值始于设置或确定灰度值,该灰度值可用于以下步骤。然后,该值用于分离图像的各个部分,有时根据其是低于还是高于该灰度值,将图像的每个部分转换为简单的黑白。
像素计数:计算亮或暗像素的数量[ 需要引证 ]
分割:将数字图像分割为多个段,以简化和/或将图像表示更改为更有意义且更易于分析的内容。
边缘检测:发现物体边缘
颜色分析:使用颜色识别零件,产品和物品,从颜色评估质量,并使用颜色隔离特征。
斑点检测和提取:检查图像中是否有相连像素(例如,灰色物体中的黑洞)的离散斑点作为图像界标。
神经网络 / 深度学习 / 机器学习处理:加权和自训练多变量决策 大约在2019年有了很大的扩展,它使用深度学习和机器学习来显着扩展机器视觉功能。
模式识别,包括模板匹配。查找,匹配和/或计数特定模式。这可以包括对象的位置,该对象可以被旋转,被另一对象部分隐藏或尺寸变化。
条码,数据矩阵和“ 二维条码 ”读数]
光学字符识别:自动读取诸如序列号之类的文本
计量/度量:测量对象尺寸(例如,以像素, 英寸或毫米为单位)
与目标值进行比较以确定“通过或失败”或“通过/不通过”结果。例如,通过代码或条形码验证,会将读取的值与存储的目标值进行比较。为了进行测量,将测量值与适当的值和公差进行比较。为了验证字母数字代码,将OCR的值与适当的或目标值进行比较。为了检查污点,可以将污点的测量大小与质量标准允许的最大值进行比较。
输出
自动检查系统的常见输出是通过/失败决定。这些决定可能进而触发拒绝失败物品或发出警报的机制。其他常见输出包括机器人引导系统的对象位置和方向信息。
另外,输出类型包括数值测量数据,从代码和字符读取的数据,对象的计数和分类,过程或结果的显示,存储的图像,来自自动空间监视MV系统的警报以及过程控制信号。还包括用户界面,用于集成多组件系统和自动数据交换的界面。